김재룡 , 설인환
저가형 유아 써멀마네킹의 제작 및 대류 열 전달 분석
Design of a Low-Cost Infant Thermal Manikin and Convective Heat Transfer Analysis
Jae Ryoung Kim, In Hwan Sul
Abstract: Thermal comfort is a crucial factor in human well-being, and clothing serves as the primary medium regulating heat exchange between the body and its surrounding environment. Traditional evaluations of clothing insulation, often expressed in Clo units, rely on thermal manikins. However, commercial thermal manikins are prohibitively expensive, limiting their accessibility for widespread research and industrial applications. This study proposes the development of a low-cost human manikin by utilizing Arduino-based control systems, 3D printing (PLA filament), ceramic heaters, fans for forced convection, and temperature-humidity sensors. The manikin shell was fabricated using FDM 3D printing technology, reflecting average human body dimensions, and the internal heating module was controlled through PID algorithms to ensure stable temperature regulation. Experimental evaluations focused on (i) temperature differences across the manikin shell to analyze thermal resistance, (ii) the impact of external environmental factors such as ambient temperature and airflow, and (iii) the relationship between power consumption and heat loss. Results indicated that the prototype manikin effectively measured thermal insulation and produced outcomes comparable to values reported in previous literature for major body regions (torso, arms, legs, and face). Some discrepancies were observed at extremities (hands and feet), where PLA’s relatively low thermal conductivity resulted in slower heat transfer compared to metal- or liquid-based manikins. Nevertheless, the system demonstrated stable performance, low energy consumption per test, and sufficient accuracy for basic clothing thermal insulation assessments. The findings confirm the feasibility of an economical and practical alternative to commercial thermal manikins, with potential applications in clothing performance evaluation, heat exchange studies, sports science, military equipment development, and educational settings.
Keywords: human manikin , 3D printing , arduino , heat exchange , low-cost
1. 서 론
인체가 일생 생활에서 느끼는 쾌적함은 다양한 요인에 의해 결정되지만, 그 중에서도 열적 요인이 가장 중요한 지표로 꼽힌다[1]. 인체와 외부 환경 사이의 열 교환은 복사, 전도, 대류와 같은 물리적 과정에 의해 이루어지며[2], 이러한 과정이 어떻게 조절되는가에 따라 인체의 열적 쾌적성이 크게 달라진다. 특히 인체는 항상성을 유지하기 위해 대사 활동을 통해 열을 생산하고, 발한이나 혈류 조절을 통해 체열을 방출한다.
이 과정에서 의복은 인체와 환경 사이의 열 교환을 조절하는 핵심적인 매개체이다. 의복은 단열성을 통해 체열 손실을 지연시키고, 섬유 구조와 재질을 통해 땀의 증발 및 수분 이동을 조절한다. 또한 의복의 두께, 직물 구조, 표면 특성(광택, 색상, 방사율)은 복사와 전도에 직접적인 영향을 미친다[3]. 따라서 의복은 단순히 신체를 가리는 보호 수단을 넘어, 인체의 열적 요인과 쾌적성을 결정짓는 가장 중요한 외부 변수라고 할 수 있다.
이러한 의복의 열적 성능 평가는 의류 산업 뿐만 아니라, 실내외 환경 설계, 스포츠 장비 개발, 군사용 장비 개발 등 다양한 분야에서 필수적이다[1,4]. 하지만 실제 인체를 대상으로 의복의 열적 특성을 평가하는 데는 한계가 존재한다. 인체는 발열과 발한이 지속적으로 변화하며, 피험자마다 생리적 특성이 달라 객관적이고 표준화된 데이터를 얻기 어렵기 때문이다. 또한 장시간 실험은 피험자에게 부담을 주며, 동일 조건에서 반복 측정하기에도 제약이 따른다. 이러한 문제를 해결하기 위해 개발된 장치가 바로 써멀마네킹(Thermal Manikin)이다[4].
써멀마네킹은 인체 형상을 모사한 마네킹 내부에 발열체와 제어 장치를 내장하여 일정한 목표 온도까지 가열한 후, 그 온도를 유지하는 데 필요한 전력을 측정함으로써 의복의 단열성과 증발 저항을 평가한다. 이를 통해 의복이나 피복 시스템이 제공하는 열저항(thermal insulation)을 나타내는 단위로, 체표면과 주변 환경 사이의 열 전달을 얼마나 억제하는지를 정량적으로 표현할 수 있는 clo 값과 같은 객관적인 열적 쾌적성 지표를 산출할 수 있으며[4], 대류·전도·복사에 의한 열 손실을 정량적으로 분석할 수 있다. 또한 온도, 습도, 풍속 등의 환경 조건을 통제할 수 있어 실제 생활 환경에서의 의복 성능을 재현 가능하다.
써멀마네킹은 1940년대 최초로 개발된 이후, 꾸준한 기술적 진화를 거듭해왔다. 초기에는 단순히 건조한 표면 상태에서 열 손실만 측정할 수 있었으나, 이후에는 땀을 모사하는 발한 마네킹, 더 나아가 관절 움직임을 구현한 동적 써멀마네킹까지 개발되었다[5].
최근에는 특정 환경과 대상에 맞춘 맞춤형 써멀마네킹의 연구가 활발히 진행되고 있다. 예를 들어 Daniel 등은 차량 및 건물 내 열 쾌적성 평가를 위해 써멀마네킹을 활용하였고[6], Jiang 등은 써멀마네킹을 사용하여 호흡 활동이 인체의 열적 편안함에 미치는 영향을 규명하였다[7]. 또한 Kurazumi 등은 성인과 유아의 열거동 차이를 분석하기 위해 유아 전용 써멀마네킹을 개발하였다[8,9].
그러나 이러한 기존 연구들은 대부분 고도의 정밀 제어 기술과 고비용 소재·장비에 의존하고 있어, 제작 비용이 매우 높을 뿐 아니라 외부 기관에 실험을 의뢰하는 경우에도 상당한 분석 비용이 요구된다. 그 결과, 대다수의 연구자, 의류 산업 종사자, 교육 현장 사용자들에게는 현실적으로 접근성이 낮다. 더 나아가 기존 연구의 초점은 주로 성인 피험자, 특정 환경(차량, 건축 등) 중심으로 맞춰져 있으며, 신생아 및 유아와 같은 취약 계층을 대상으로 한 저비용·실용적 연구는 여전히 부족한 상황이다.
이에 본 연구는 아두이노 키트, 3D 프린터 등 범용적이고 저비용의 장비를 활용하여 누구나 제작할 수 있는 저가형 써멀마네킹을 구현하는 것을 일차적 목표로 한다. 특히 생존과 직결되는 체온 유지가 중요한 신생아 및 유아용 마네킹 제작에 초점을 맞추고, 발열부 구조를 단순화하면서도 자연 대류와 강제 대류를 효과적으로 활용하여 목표 온도에 신속히 도달할 수 있는 열 전달 시스템을 설계하고자 한다.
2. 실 험
2.1. 실험 장비
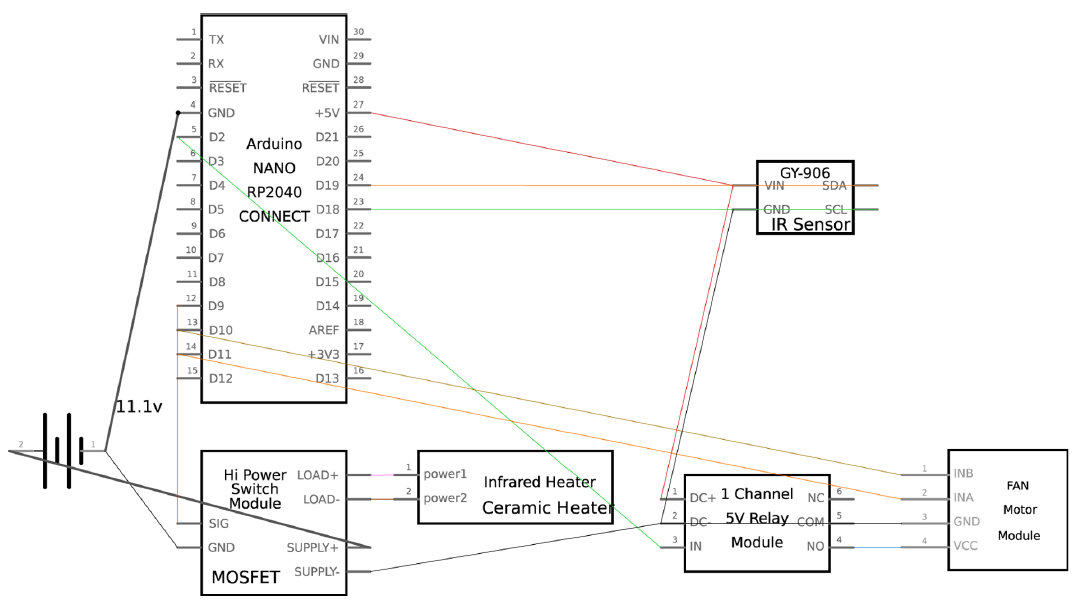
열원 제어 장비: 열원 제어 실험은 arduino.cc사의 오픈소스 기반 단일 보드인 Arduino nano를 주요 제어 모듈로 하고, 적외선 온도 센서(MLX-90614, (주)SMG), 블루투스 모듈(HC-06, (주)제이케이이엠씨), 세라믹히터(CM8, (주)SCIPIA), 그리고 공기 순환을 위한 팬모터(L9110, (주)Eleparts)를 사용하였다. 세라믹 히터를 작동하기 위해서는 기존 아두이노에서 출력되는 5 V로는 부족하기 때문에 3.7 V의 리튬 배터리를 3개를 직렬 연결하여 11.1 V를 사용하였다. 일반적으로 사용하는 1.5 V 알칼라인 배터리는 8개의 직렬 연결로 12 V로 사용을 하였으나 세라믹히터의 발열 출력엔 이상이 없지만 장기 가동 시 알칼라인 배터리 자체가 발열하여 사고의 위험이 있기에 리튬 배터리를 사용하였다.
마네킹 3D 프린팅 장비: 써멀마네킹의 외피 형상이 될 마네킹의 제작은 (주)신도리코의 FDM 방식 3D프린터(DP-103)와 PLA 필라멘트를 사용하였다.
2.2. 제작 진행
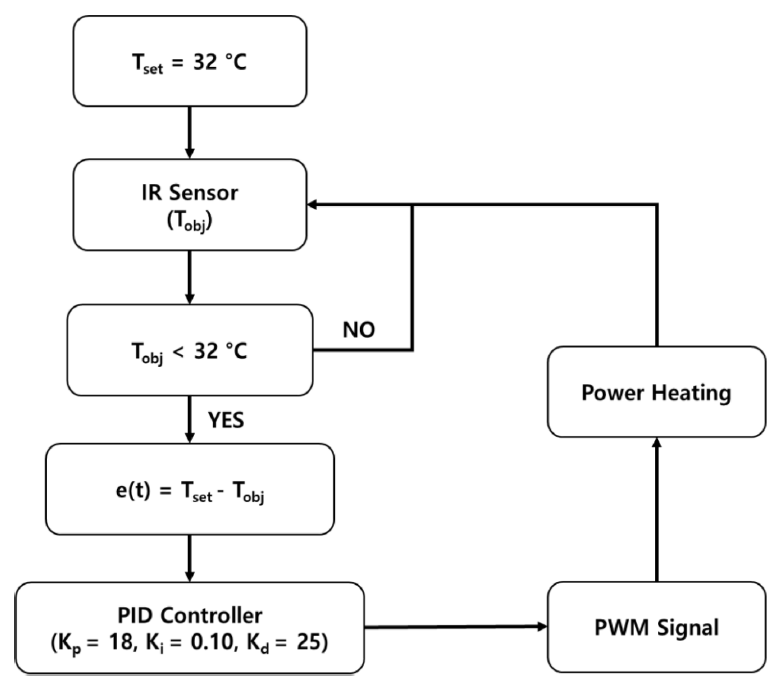
내부 열원 제어: 내부 열원 제작은 적정 온도를 설정하여 온습도 센서에서 측정한 온도가 설정 온도, 즉 체온과 같은 온도인 32 oC 보다 낮을 시 세라믹 히터가 가열되며 온도를 상승시키고 내부 팬이 작동하여 해당 열을 마네킹 내부에 대류 효과로 순환시키게 하였다. 팬모터에는 5 V의 전압을 가하여 풍속 1.8 m/s를 출력할 수 있도록 하였으며 세라믹 히터는 대류와 전도를 이용하여 열 전달을 위해 11.1 V의 외부 전압을 가하여 [TeX:] $$110^{\circ} \mathrm{C}$$ 이상의 온도를 출력할 수 있도록 하였다. 적외선 열 센서를 사용하여 측정점의 온도가 설정한 온도보다 높을 시 세라믹 히터의 가열은 종료되고 내부 팬만 작동하여 잔열이 순환할 수 있도록 하였다. 이에 대한 회로도는 Figure 1과 같다. 온도 제어에서는 열 분석에 가장 널리 사용되는 비례, 적분 및 미분(PID)제어[10]를 사용했으며 Figure 2와 같다.
마네킹 제작: 써멀마네킹은 크기가 작을 수록 제작이 어려우므로 아동, 특히 생후 1개월된 신생아 남아의 WHO 평균 체형[11]을 기준으로 마네킹을 제작하였다. WHO에서는 신생아의 영양 상태 및 발달에만 집중하여 머리둘레와 키, 몸무게의 정보만 제공하기 때문에, 팔, 다리 등 세부적인 지표들은 관련 선행 연구와 KS 표준 자료 등[12,13]을 참고하여 제작하였다.
먼저 목표로 하는 체형 데이터를 기반으로 무료 모델링 SW인 Blender에서 마네킹의 3D 형상을 Figure 3과 같이 재구성한 후, 외피로 사용할 수 있도록 필요 부위를 분리(segmentation)하고 두께를 균일하게 유지하기 위해 쉘 변환(shell modifier)을 적용하였다. 최종적으로 마네킹 외피는 약 2 mm의 단일벽 구조를 갖도록 설계하였으며, 이는 실험 중 내부 히터 모듈로부터 발생한 열이 표면으로 전달되는 전도 경로를 일정하게 유지하기 위한 목적이다. 제작 과정에서는 DP-103 프린터의 기본 노즐(0.4 mm)을 사용하였고, 노즐 온도는 [TeX:] $$210^{\circ} \mathrm{C}$$, 베드 온도는 [TeX:] $$60^{\circ} \mathrm{C}$$로 설정하였다. 출력 품질 확보를 위해 적층 두께(layer height)는 0.2 mm로 설정하였으며, 구조적 강성을 확보하기 위한 내부 채움률(infill)은 10–15%로 적용하였다. 마네킹 외피는 단일 출력으로 제작하기 어려워 신체 부위를 상·하체, 팔, 다리 등 6–10개 섹션으로 분할 후 출력하였으며, 각 부위는 출력 변형을 최소화하기 위해 래프트(raft) 옵션을 사용하였다. 출력된 파트의 부위 간 연결은 내측에서 핫멜트 접착으로 1차 고정한 후, PLA 표면을 국부적으로 가열·용융시켜 최종 접합하여 밀폐도를 확보하였다. 최종 제작된 마네킹의 규격은 Table 1과 같다.
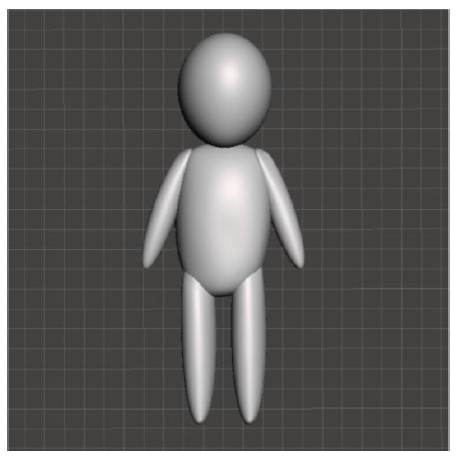
Table 1.
| Body part | Length (cm) | Ratio (%) |
|---|---|---|
| Head | 11 | 22 |
| Body | 32 | 65 |
| Arm | 12 | 25 |
| Leg | 17 | 35 |
| Head circumference | 35 | - |
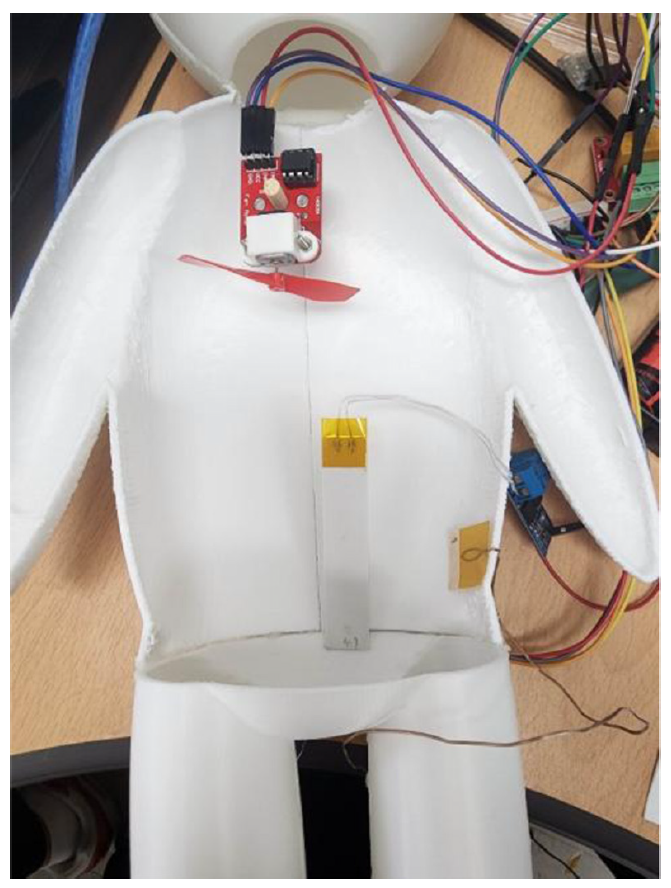
써멀마네킹 제작: 본 연구에서 사용한 써멀마네킹의 발열원은 몸통의 무게 중심부에 단일 히터 형태로 배치하였다. 이는 인체의 대사열이 주로 체간(core)에서 발생한다는 기본 열생리 구조를 반영한 것으로[13,14], 중심부–표면 간의 열전달을 단일 열원으로 근사하여 구현하기 위함이다. 히터는 Figure 4와 같이 PLA 쉘 내부의 빈 공동 구조를 통해 전도 및 대류로 표면에 열을 전달하도록 하였으며 ISO 15831:2004[15] 및 ASTM F1291의 구조적 요구사항과도 충돌하지 않는다. 독일 항공우주센터에서 제안한 저가형 써멀 마네킹 개념[16]을 참고하여 써멀마네킹을 제작하였다.
Figure 4.
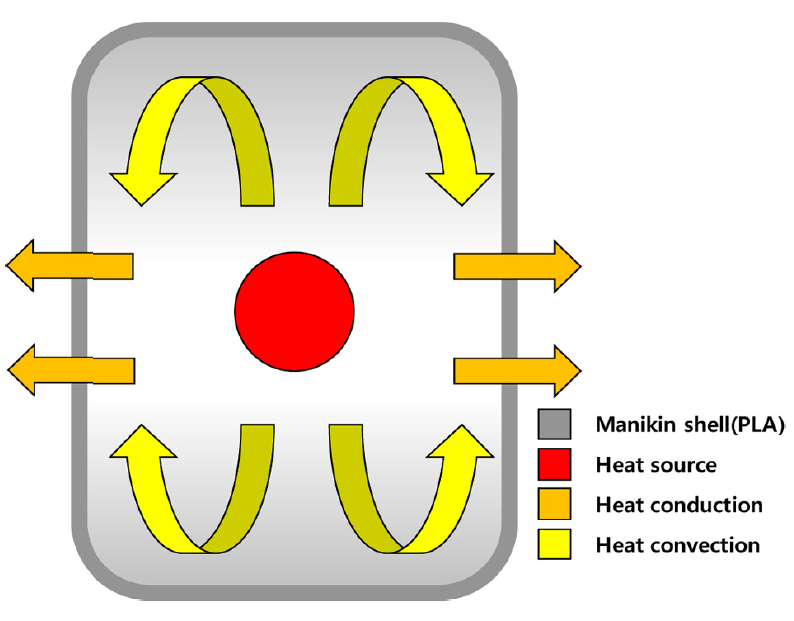
모든 제어는 하나의 PID 루프와 MOSFET 회로로 구성 하였다. 강제대류 실험에서는 내부 상승기류를 보정하기 위해 팬을 하향 흐름을 유도하는 방향으로 설치하여 열 재분포의 편향을 최소화하였다. 전체 배치 구조는 Figure 5에 나타내었다.
Figure 5.
아두이노 기반 PID 온도 제어 시스템: 본 연구에서는 아두이노 기반 PID 제어 시스템을 설계하여 저가형 써멀 마네킹의 표면 온도 제어 성능을 검증하였다. 시스템은 적외선 센서를 이용하여 표면 및 주변 온도를 측정하고, MOSFET 회로를 통해 세라믹 히터에 인가되는 전력을 디지털 신호(0/1, ON/OFF)를 매우 빠르게 켰다 껐다 하면서, 평균적으로 아날로그 값처럼 보이는 출력을 만드는 제어 방식인 PWM(pulse width modulation) 방식으로 조절하도록 구성하였다. 제어 알고리즘은 목표온도 [TeX:] $$\mathrm{T}_{\text {set }}$$와 실제 표면온도 [TeX:] $$\mathrm{T}_{\text {obj }}$$ 간의 오차식을 기반으로 식 (1)과 같이 정의하였다[14].
(1)
[TeX:] $$\begin{aligned} & e(t)=T_{\text {set }}-T_{\text {obj }} \\ & u(t)=K_p e(t)+K_i \int_0^t e(\tau) d \tau+K_d \frac{d e(t)}{d t} \end{aligned}$$여기서 u(t)는 히터에 인가되는 제어 출력으로, PWM 신호(0–255 범위)로 변환되어 적용된다. 제어 안정성을 확보하기 위해 적분항의 누적 제한(anti-windup)을 도입하였고, 목표치보다 크게 낮은 경우에는 일정 구간에서 히터를 풀 파워로 구동하는 웜업 제어를 추가하였다.
여기서 식 (1)과 (2)을 대입하여 식 (3)을 도출한다.
(3)
[TeX:] $$\begin{aligned} &u(t)=255, e(t) \geq e_{\text {warmup }}\\ &u(t)=K_p e(t)+K_i \int e+K_d \frac{d e}{d t}, e(t) \lt e_{\text {warmup }} \end{aligned}$$모든 제어 데이터는 쉼표를 구분기호로 사용하는 텍스트 파일인 CSV (Comma-Separated Values) 형식으로 기록되었으며, Python(Matplotlib, PySerial)을 이용하여 실시간 시각화 및 분석을 수행하였다.
열전달 구성요소 분석: 본 연구에서는 써멀마네킹 내부 히터에서 외기까지 전달되는 열손실을 정량화하기 위해 전도(conduction), 대류(convection), 복사(radiation)를 포함하는 열전달 모델을 적용하였다[15]. 내부 히터 온도 [TeX:] $$\mathrm{T}_{\text {in }},$$ 쉘 외부 표면 온도 [TeX:] $$\mathrm{T}_{\text {out }},$$ 외기 온도 Ta를 측정하여, 단위 시간당 총 열손실 Q는 다음 식 (4)와 같이 계산하였다.
(4)
[TeX:] $$\dot{Q}=\frac{T_{\text {in }}-T_{\text {out }}}{\frac{L}{K}+\frac{1}{h_{\text {out }} A}}$$Q: 열유량(W)
L: 두께(m)
k: 열전도율(W/m·K)
A: 단면적(m2)
[TeX:] $$\mathrm{h}_{\text {out }}$$: 외부 대류열전달계수(W/m·K)
[TeX:] $$\mathrm{T}_{\mathrm{in}}-\mathrm{T}_{\mathrm{ou}} \mathrm{t}$$: 내부외벽–외부외벽 온도차(K)
위의 식 (4)는 내부 히터에서 외부 표면까지의 전도저항과 표면–외기 사이의 대류저항이 직렬로 구성된 등가 열저항 모델이며, 측정된 온도 구배[TeX:] $$\left(\mathrm{T}_{\text {in}}-\mathrm{T}_{\text {out}}\right)$$를 통해 전체 열손실 Q를 산정하는 데 사용하였다.
총 열량 Q로부터 단위 면적당 열유속(heat flux) [TeX:] $$q^{\prime \prime}$$은 식 (5)와 같이 구하였다.
(5)
[TeX:] $$q^{\prime \prime}=\frac{\dot{Q}}{A}=\frac{T_{\text {in }}-T_{\text {out }}}{\frac{L}{K}+\frac{1}{h_{\text {out }}}}$$이때 [TeX:] $$q^{\prime \prime}$$는 표면에서 외기로 전달되는 국부 열손실 강도를 나타내며, 각 시간 단계에서 표면 온도 변화에 대응하는 열전달량을 비교하는 데 활용하였다.
또한 쉘 표면에서 외기로의 열손실을 대류 성분과 복사 성분으로 분리하여 평가하기 위해 식 (6)을 사용하였다[16]. 먼저, 대류에 의한 열손실은 두었으며, 여기서 [TeX:] $$\mathrm{T}_{\mathrm{s}}$$는 쉘 표면 온도, [TeX:] $$\mathrm{T}_{\mathrm{a}}$$는 외기 온도이다. 자연대류(Fan off) 및 강제대류(Fan on) 조건에서 동일한 측정 프로토콜을 적용하고, 각 조건에서 [TeX:] $$\mathrm{T}_{\mathrm{s}}-\mathrm{T}_{\mathrm{a}}$$의 차이를 바탕으로 시간에 따른 [TeX:] $$\mathrm{Q}_{\mathrm{conv}}$$ 변화를 계산하였다.
복사에 의한 열손실은 슈테판–볼츠만 법칙에 따라 정의하였다[17,18]. 여기서 [TeX:] $$\varepsilon$$은 PLA 표면 방사율, σ는 슈테판-볼츠만 상수이다. 실험에서는 각 시간 단계에서 기록된 [TeX:] $$\mathrm{T}_{\mathrm{s}}$$와 [TeX:] $$\mathrm{T}_{\mathrm{a}}$$를 이용하여 [TeX:] $$\mathrm{Q}_{\text{rad}}$$를 산출하였고, [TeX:] $$\mathrm{Q}_{\text{conv}}$$ 및 전도-대류 모델에서 구한 Q와 비교함으로써, 온도 범위와 대류 조건에 따른 복사·대류 기여도의 상대적 크기를 분석하였다.
전력 사용량 계산: 히터 및 보조 구동장치의 작동에 따른 누적 전력 사용량은 다음의 기본 전력 식 (8)을 이용하여 계산하였다[19].
여기서 P는 순간 소비 전력(W), t는 작동 시간(초 또는 시간 단위), E(t)는 해당 시간 동안 소모된 전력(J 또는 Wh)이다. 본 연구에서는 실험 중 기록된 히터의 출력(PWM 신호에 기반한 실시간 전력값)과 구동 시간을 이용하여 누적 전력을 산출하였으며, 초 단위에서 계산된 전력은 1 Wh = 3600 J을 이용하여 Wh 단위로 환산하였다. 이 과정을 통해 히터 단독 소비 전력뿐 아니라 팬과 센서 등 보조 장치의 실제 전력 요구량도 함께 평가할 수 있었다.
써멀마네킹 단열성 계산: 지난 연구[20]와 같이 본 연구 에서 제작된 써멀마네킹을 검증하기 위해 KS K ISO 15831[21] 에 따라 의복의 단열력을 측정하였다. 식 (9)는 누드상태에 대한 경계 공기층의 총 단열성[TeX:] $$\left(\mathrm{I}_{\mathrm{a}}\right)$$이다.
3. 결과 및 고찰
3.1. 온도 제어 확인
PID 제어 검증: PID 제어기의 정상 동작과 안정성을 검증하기 위하여, 본 연구에서는 제작을 진행할 써멀마네킹과 동일한 재질과 두께 조건(PLA, 5 mm)을 갖는 인위적 열챔버를 제작하였다. 챔버 내부에는 세라믹 히터와 적외선 온도 센서를 배치하였으며, 외부 팬을 사용하지 않은 자연 대류 조건에서 온도 제어를 수행하였다. Figure 6은 목표 온도를 [TeX:] $$32^{\circ} \mathrm{C}$$로 설정했을 때의 PID 제어 응답을 나타낸다.
Figure 6.
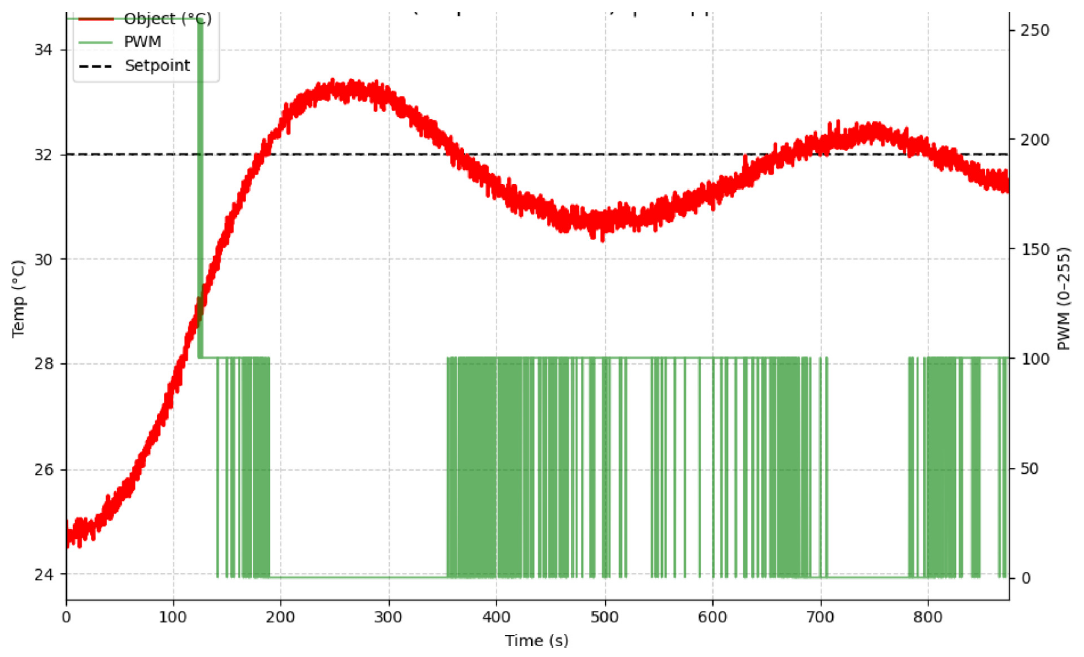
초기 단계에서 표면 온도가 목표치보다 낮아 큰 오차가 발생하자 제어기는 PWM 출력을 [TeX:] $$100^{\circ} \mathrm{C}$$ 이상까지 상승시켜 적극적인 가열을 수행하였고, 이후 온도가 목표치에 근접함에 따라 출력이 점차 감소하였다. 최종적으로 표면 온도는 약 [TeX:] $$31.8-32.5^{\circ} \mathrm{C}$$ 범위에서 안정적으로 유지되었으며 오차는 [TeX:] $$\pm 0.3^{\circ} \mathrm{C}$$ 이내로 수렴하였다. PWM 신호는 온도 편차에 비례하여 실시간으로 조정되는 형태를 보였으며, 이는 비례·적분·미분 항이 상호 보완적으로 작동하여 과열을 방지하고 안정적인 온도 유지 성능을 발휘했음을 나타낸다.
본 연구에서 사용된 PID 파라미터는 [TeX:] $$\mathrm{K}_{\mathrm{p}}=18.0, \mathrm{~K}_{\mathrm{i}}=0.1, \mathrm{~K}_{\mathrm{d}}=25.0$$으로 설정하였다. 이러한 설정은 히터-센서 시스템의 열적 응답 특성을 고려하여 실험적으로 조정된 결과이다. 우선, 세라믹 히터는 열관성이 크고 PLA 벽면(5 mm)의 열전도율이 낮기 때문에, 온도 상승 반응이 느리게 나타난다. 따라서 빠른 초기 응답을 확보하기 위해 비례 이득[TeX:] $$\left(\mathrm{K}_{\mathrm{p}}\right)$$을 높게 설정하였다. 그러나 히터의 잔열로 인해 목표 온도 부근에서 오버슈트가 발생할 가능성이 높으므로, 미분 이득[TeX:] $$\left(\mathrm{K}_{\mathrm{d}}\right)$$을 크게 두어 오차 변화율에 따라 출력을 선제적으로 감속시켰다. 마지막으로 적분 이득[TeX:] $$\left(\mathrm{K}_{\mathrm{i}}\right)$$은 과도한 적분 포화를 방지하기 위해 매우 낮은 값(0.1)으로 설정하여, 정상상태 오차만 천천히 보정하도록 하였다.
내외부 외벽 온도 측정: 먼저 히터 중심부에서 발생한 열이 내부 공동을 따라 상·하 방향으로 재분포되는 열전달 특성을 확인하기 위해, 마네킹의 내부 쉘과 외부 쉘에서 각각 온도 센서를 배치하여 시간에 따른 온도 응답을 측정하였다. 특히 내부의 자연대류가 표면 온도에 미치는 영향과, 팬을 작동시켜 하향 기류를 형성했을 때의 강제대류 조건을 비교함으로써 열 재분포 방식의 차이를 분석하였다. 이러한 온도 측정은 히터 작동 후 열이 중심부에서 표면까지 전달되는 과정과 표면–공기 간 열손실 구조를 확인하기 위한 목적이었다.
센서를 사용하여 제작한 써멀마네킹의 각 신체부위의 내부 쉘과 외부 쉘의 온도를 측정하고 비교하였다. 이때 팬을 작동하여 강제대류 상태와 팬을 작동하지 않아 내부의 자연대류 상태일 때의 온도 측정도 함께 비교하였으며 이는 Table 2와 Figure 7과 같다. 히터 구동 직후 PID 제어기는 큰 온도 오차를 보정하기 위해 약 24 W 수준의 최대 전력을 인가하였으며, 이후 약 15분이 경과하면 시스템이 안정 상태에 도달하였다. 이때 내부 온도는 설정온도인 [TeX:] $$32^{\circ} \mathrm{C}$$에 수렴하였으나, 외부 표면은 약 [TeX:] $$29-30^{\circ} \mathrm{C}$$ 수준으로 유지되어 약 [TeX:] $$2-3^{\circ} \mathrm{C}$$의 온도 차이가 형성되었다(Figure 8). 이는 얇은 PLA 쉘을 통한 열전도 손실과 외부 공기와의 대류열 전달이 동시에 발생하기 때문으로 해석된다.
Table 2.
| Time (min) | Torso_Int | Torso_Ext | Arms_Int | Arms_Ext | Legs_Int | Legs_Ext | Hands_Int | Hands_Ext | Feet_Int | Feet_Ext |
|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 25 | 24.5 | 25 | 24.5 | 25 | 24.5 | 25 | 24.5 | 25 | 24.5 |
| 5 | 31.7 | 28.5 | 28.1 | 25.9 | 27 | 25.2 | 26.1 | 25 | 25.9 | 24.8 |
| 10 | 34 | 30.9 | 30.2 | 27.4 | 30.6 | 27.5 | 27.3 | 26 | 27 | 25.6 |
| 15 | 34.3 | 30.9 | 31.2 | 28.1 | 31.1 | 28 | 27.5 | 26 | 27.4 | 25.9 |
| 20 | 34.4 | 31.3 | 31.2 | 28.3 | 31.4 | 28.5 | 27.6 | 26.3 | 27.4 | 26 |
| (a) | ||||||||||
| Time (min) | Torso_Int | Torso_Ext | Arms_Int | Arms_Ext | Legs_Int | Legs_Ext | Hands_Int | Hands_Ext | Feet_Int | Feet_Ext |
| 0 | 25 | 24.5 | 25 | 24.5 | 25 | 24.5 | 25 | 24.5 | 25 | 24.5 |
| 5 | 29.7 | 28.4 | 29 | 27.5 | 28.6 | 26.8 | 27 | 26.2 | 27.2 | 26.3 |
| 10 | 31.5 | 30 | 30.5 | 29 | 30.1 | 28.7 | 28.3 | 27.5 | 29 | 28.2 |
| 15 | 32.9 | 30.5 | 30.9 | 29.3 | 30.6 | 29 | 29.9 | 28.2 | 30 | 28.5 |
| 20 | 33 | 30.7 | 31.1 | 29.5 | 30.8 | 29.1 | 30.2 | 28.4 | 30.1 | 28.7 |
| (b) | ||||||||||
Figure 7.
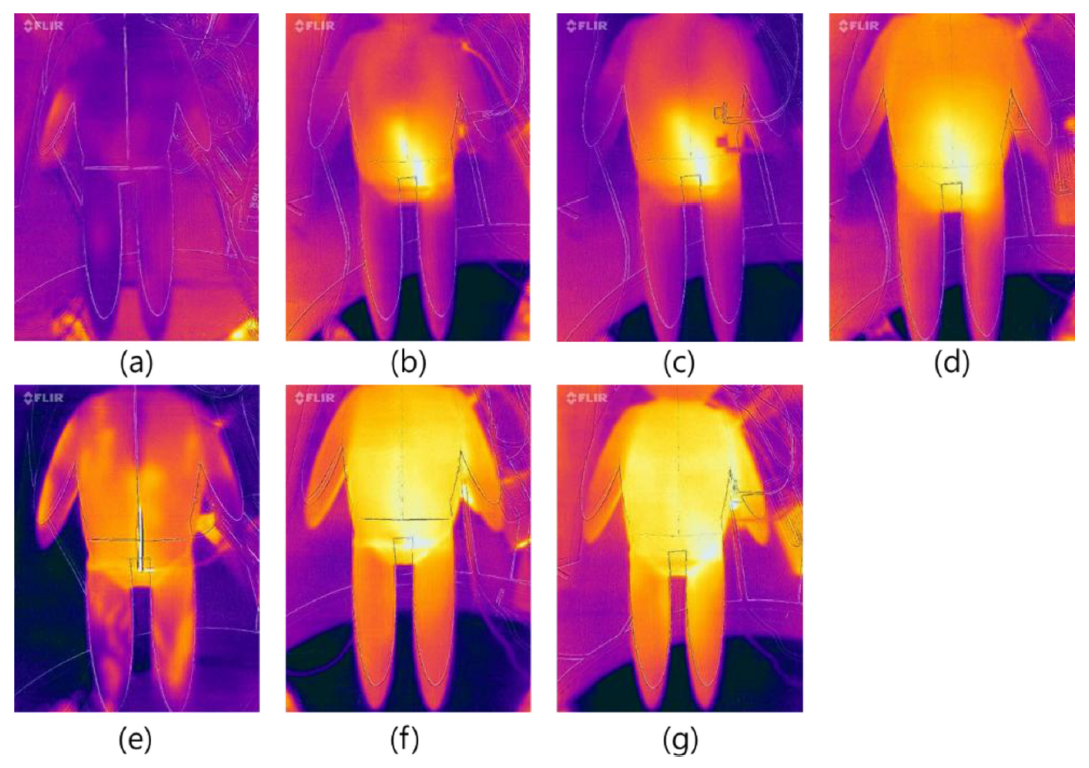
Figure 8.
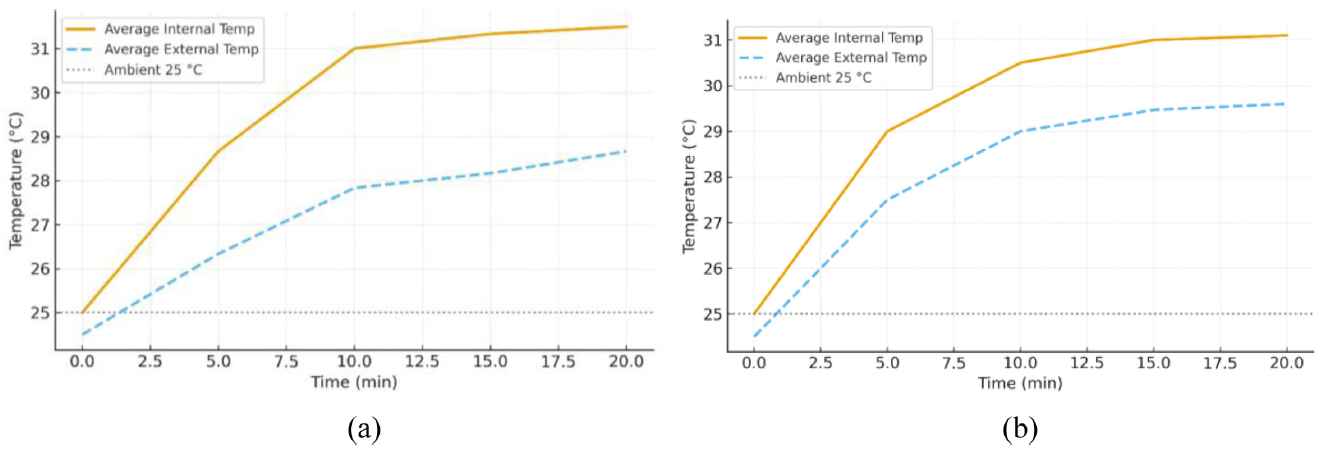
부위별 표면 온도 상승은 Figure 9와 같다. 몸통 부위(Torso)는 평균 약 [TeX:] $$31^{\circ} \mathrm{C}$$로 목표 온도에 도달한 반면, 팔·다리(Arms/Legs)는 약 [TeX:] $$28^{\circ} \mathrm{C}$$, 손·발(Hands/Feet)은 [TeX:] $$26^{\circ} \mathrm{C}$$ 수준으로 유지되어 중심부 대비 말단부의 온도 차는 약 [TeX:] $$4^{\circ} \mathrm{C}$$로 관찰되었다. 이러한 결과는 자연대류 상태에서 내부 열이 말단부까지 충분히 전달되지 못해 열 구배가 형성된다는 점을 보여준다. 즉, 복사와 전도만으로는 내부 열이 고르게 확산되지 못하며, 말단부는 히터로부터 먼 거리와 낮은 대류효율 때문에 목표 온도에 도달하지 못하였다.
Figure 9.
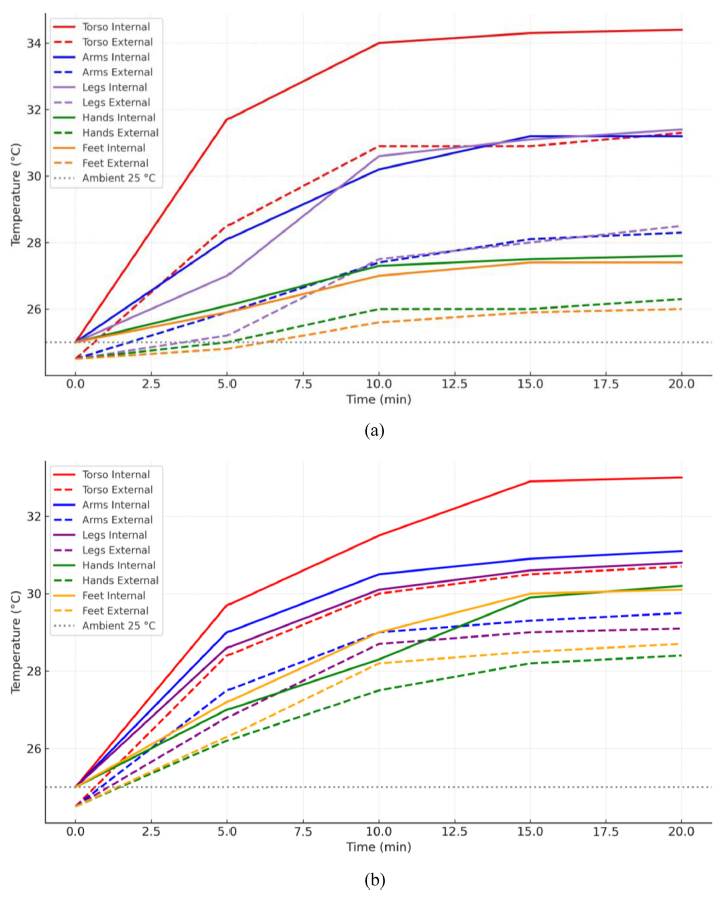
이에 반해 팬을 구동하여 내부 강제대류를 형성한 경우, 히터에서 발생한 열이 빠르게 내부 공간 전역으로 확산되며, 말단부의 표면온도가 평균 [TeX:] $$29^{\circ} \mathrm{C}$$ 수준까지 상승하였다. 이는 내부 유동이 증가하면서 공기층 내의 정체 구역이 제거되고, 대류계수[TeX:] $$\left(\mathrm{h}_{\mathrm{in}}\right)$$가 상승하여 히터-쉘 사이의 열전달이 향상된 결과이다. 팬 구동 시 몸통과 말단부의 온도차가 약 [TeX:] $$1-2^{\circ} \mathrm{C}$$로 감소함에 따라 표면 온도 균일도(uniformity)가 크게 향상되었다.
3.2. 열 분석
각 부위 별 열 손실 측정: Figure 10은 15–20분 정상상태 구간에서 측정된 내부·외부 온도를 기반으로, 전도–대류 복합 열전달 모델을 적용하여 계산한 부위별 열손실 결과를 나타낸다. Torso, Arms, Legs, Hands, Feet의 다섯 영역을 독립적으로 분석하였으며, 자연대류(Fan off)와 강제대류(Fan on) 조건을 비교하였다.
Figure 10.
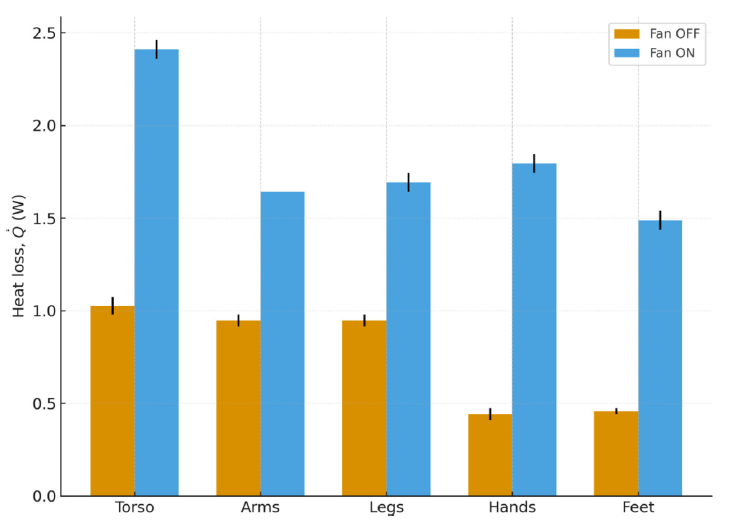
자연대류 조건에서는 Torso의 열손실이 약 3.0 W로 가장 높았으며, Arms와 Legs는 약 1.7W 수준, Hands와 Feet는 각각 약 0.9 W와 0.8 W로 낮게 나타났다. 이러한 차이는 내부 열원이 중심부에 위치하고 있으며, 팬이 작동하지 않는 상황에서는 내부 열이 주로 전도에 의해 확산되기 때문이다. 즉, 중심부 근처에서 온도 구배가 크게 형성되어 Torso 주변으로 열이 집중되며, 말단부로 갈수록 전도 경로가 길어지는 만큼 외부로 방출되는 열량이 제한되는 경향을 보였다. 이로 인해 부위 간 열손실은 강한 비균일성을 나타냈다.
반면 강제대류(Fan ON) 조건에서는 모든 부위에서 열손실이 크게 증가하였다. Torso는 약 7.5 W, Arms와 Legs는 약 4−5 W 수준, Hands와 Feet 또한 4 W 이상으로 상승하여 Fan OFF 대비 약 2–3배 증가하였다. 특히 자연대류에서 가장 낮았던 말단부(Hands, Feet)의 열손실이 중심부와 유사한 수준까지 상승한 것이 특징적이다. 이는 팬 작동으로 인해 외부 대류열전달계수[TeX:] $$\left(h_{\text {out }}=30 \mathrm{~W} / \mathrm{m}^2 \mathrm{~K}\right)$$가 증가하면서 표면 경계층이 얇아지고, 외피 표면에서의 열저항이 감소하였기 때문이다. 이 과정에서 표면 열유속이 균일해지며, 부위 간 열손실 편차가 크게 줄어드는 양상을 보였다.
이러한 비교 결과는 자연대류 환경에서는 전도 지배형 열전달이, 강제대류 환경에서는 대류 지배형 열전달이 우세해지는 메커니즘을 잘 보여준다. Fan off의 경우 중심부에 열이 축적되고 말단부에서 열손실이 제한되는 반면, Fan on 조건에서는 외부 대류에 의해 전체 표면에서의 열 방출이 고르게 촉진되어 보다 균등한 열거동을 나타낸다.
타 문헌과의 부위별 열 손실 비교: 본 연구에서 측정된 써멀마네킹의 부위별 평균 열손실(heat loss) 및 단위면적당열유속(heat flux)은 기존 문헌에서 보고된 실험 결과와 비교하여 분석하였다. 열유속은 식 (5)와 같이 계산하였으며 Figure 11은 Sarman 등[22], Elabbassi 등[23], Hannouch 등[24], Ginalski 등[25]에서 제시된 열 유속값을 본 연구의 열유속과 함께 정리한 것이다.
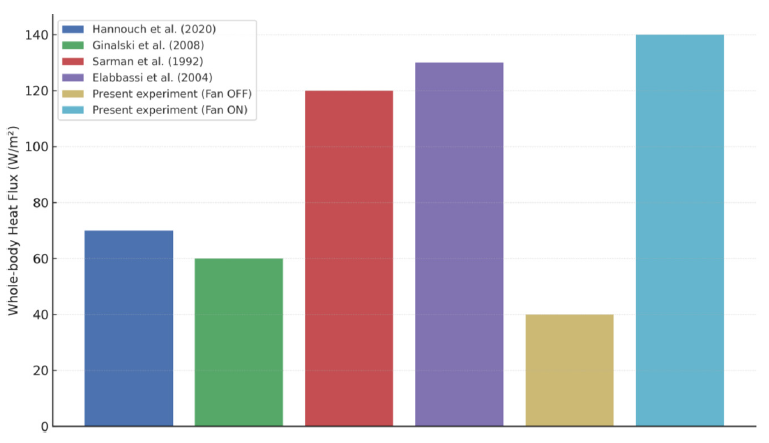
먼저, 문헌에서 보고된 열유속는 약 [TeX:] $$60-130 \mathrm{~W} / \mathrm{m}^2$$ 범위로 분포하였으며, Sarman 등[22]과 Elabbassi 등[23]의 써멀 마네킹의 열유속 값이 상대적으로 높게 나타났다(각각 약 [TeX:] $$120 \mathrm{~W} / \mathrm{m}^2, 130 \mathrm{~W} / \mathrm{m}^2$$). 이는 이들 연구가 풍속이 존재하는 조건(0.3-0.4 m/s) 또는 환경 챔버 기반 대류 조건을 포함하고 있어 대류 열전달계수가 상대적으로 높았기 때문으로 해석된다. 반면 Hannouch 등[24]과 Ginalski 등[25]의 써멀 마네킹 열유속은 각각 약 [TeX:] $$70 \mathrm{~W} / \mathrm{m}^2, 60 \mathrm{~W} / \mathrm{m}^2$$로 비교적 낮았으며, 이는 정적 기류 조건 또는 낮은 표면 대류계수를 유지하는 세팅을 반영한다.
본 연구의 자연대류 조건에서 열유속은 약 [TeX:] $$40 \mathrm{~W} / \mathrm{m}^2$$로 나타나 기존 문헌의 최소값보다 낮았다. 이는 본 연구의 마네킹이 PLA 2mm 쉘 구조를 가지며, 내부 공기 흐름이 제한된 자연대류 환경에서 실험이 수행되었기 때문이다. 즉, 외부 대류열전달계수가 약 [TeX:] $$7 \mathrm{~W} / \mathrm{m}^2 \cdot \mathrm{~K}$$ 수준으로 매우 낮은 환경에서 열손실이 주로 전도에 의해 지배되었고, 그 결과 전체 열손실량이 기존 문헌 대비 작은 값으로 나타났다. 또한 부위별 열손실에서도 몸통 중심부가 0.9 W로 가장 컸으며, 팔/다리(0.7 W), 손/발(0.4 W) 순으로 감소하는 양상을 보였다. 말단부에서는 히터와의 거리 및 열전도 경로 차이로 인해 상대적으로 낮은 열손실이 측정되었다.
반면 강제대류 조건에서는 열유속이 약 [TeX:] $$140 \mathrm{~W} / \mathrm{m}^2$$까지 증가하여, 기존 문헌 중 가장 높은 값을 보인 Elabbassi 등 [23]의 써멀마네킹의 열유속인 [TeX:] $$130 \mathrm{~W} / \mathrm{m}^2$$보다 높은 수준을 기록하였다. 이는 팬 작동으로 외부 경계층이 얇아지고 대류열전달계수가 약 [TeX:] $$30 \mathrm{~W} / \mathrm{m}^2 \cdot \mathrm{~K}$$ 수준까지 증가하면서 전체 표면에서 열이 빠르게 방출된 결과이다.
종합적으로, 본 연구의 자연대류 조건은 기존 문헌의 정적 조건보다 더 낮은 열손실을 보였으며, 강제대류 조건은 기존 대류 조건 연구와 유사하거나 그 이상 수준의 열 유속을 나타냈다. 이는 저가형 PLA 기반 마네킹이라 하더라도 대류환경 조절에 따라 실제 상용형 마네킹과 동등한 열손실 특성을 재현할 수 있음을 의미한다. 또한 부위별 열손실 패턴 역시 기존 문헌과 일관된 양상을 보여, 본 연구에서 구현된 열전달 구조와 PID 기반 온도제어 방식이 문헌 기반 열생리 모형과 정합성을 갖춘다는 점을 확인하였다.
외부 대류와 복사에 대한 전체 열 손실 측정: 본 실험에서 관측된 총 열손실은 복사(radiation)와 대류(convection)에 의해 복합적으로 발생하였으며, 그 상대적 비중을 분석하였다(Figure 12).
Figure 12.
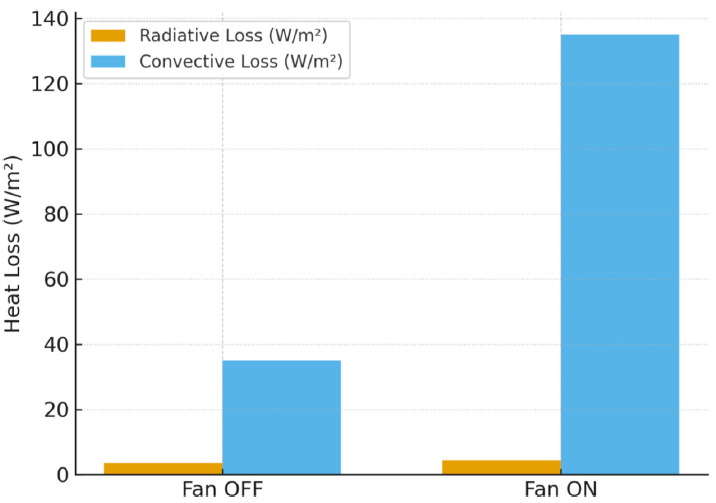
자연대류 조건에서 표면 온도 [TeX:] $$\mathrm{T}_{\mathrm{s}}=303 \mathrm{~K}\left(30^{\circ} \mathrm{C}\right),$$ 주변온도 [TeX:] $$\mathrm{T}_{\mathrm{a}}=298 \mathrm{~K}\left(25^{\circ} \mathrm{C}\right)$$일 때 복사에 의한 열손실은 약 [TeX:] $$3.5 \mathrm{~W} / \mathrm{m}^2$$ 수준이었다. 강제대류 조건에서도 표면 온도가 [TeX:] $$\mathrm{T}_{\mathrm{s}}=305 \mathrm{~K}\left(32^{\circ} \mathrm{C}\right)$$로 상승함에 따라 복사 손실이 약 [TeX:] $$4.4 \mathrm{~W} / \mathrm{m}^2$$로 증가하였으나, 전체 열유속에 대한 기여도는 약 10% 이하로 제한적이었다. 따라서 본 시스템에서의 복사 열전달은 전체 열손실의 일부에 불과하며, 대류 현상이 지배적임을 확인하였다.
반면, 대류 손실은 공기 유동에 직접적으로 의존하며, 자연대류 시 외부 대류열전달계수[TeX:] $$\left(\mathrm{h}_{\text {out}}\right)$$은 약 [TeX:] $$7 \mathrm{~W} / \mathrm{m}^2 \cdot \mathrm{~K}$$로 평가되었고, 온도차가 5K일 때 대류에 의한 열손실은 약 [TeX:] $$35 \mathrm{~W} / \mathrm{m}^2$$로 계산되었다. 그러나 강제대류 조건에서는 팬 작동에 따라 공기 흐름이 강화되며 [TeX:] $$\mathrm{h}_{\text {out }}$$이 약 [TeX:] $$30 \mathrm{~W} / \mathrm{m}^2 \cdot \mathrm{~K}$$로 증가하였고, 동일한 온도차에서 대류 손실이 약 [TeX:] $$150 \mathrm{~W} / \mathrm{m}^2$$로 상승하였다. 이로써 전체 열손실의 약 85−90%가 대류에 의해 결정되며, 이는 팬 작동에 따른 표면 경계층 붕괴 및 열저항 감소에 기인한 결과이다.
요약하면, 자연대류 조건에서는 열전달이 전도와 복사에 의해 제한적으로 이루어지며, 중심부에 열이 정체되는 구간이 형성된다. 반면 강제대류 상태에서는 대류가 지배적인 열전달 경로로 작용하며, 표면을 통한 열 방출량이 약 3.5배 증가하였다.
3.3. 전력량 분석
실험에 사용된 히터는 3개의 리튬이온 배터리(정격 11.1 V, 만충 12.6 V)로부터 공급되며, 저항은 [TeX:] $$5 \Omega$$으로 측정되었다. 동특성에 기반한 이론적 최대 전력은 다음과 같다. 만충 시에는 약 31.8W까지 상승한다. 그러나 PID 제어가 정상 동작하며 표면 온도를 목표값[TeX:] $$\left(32^{\circ} \mathrm{C}\right)$$으로 유지할 경우 PWM 값이 감소함에 따라 실측 평균 소비전력 [TeX:] $$\mathrm{P}_{\mathrm{avg}}$$는 이론값보다 낮게 나타났다.
자연대류 조건에서는 표면온도[TeX:] $$\left(29.5-30.5^{\circ} \mathrm{C}\right)$$ 유지 시 평균 소비전력이 약 2−3W 수준으로 관측되었다. 강제대류 조건에서는 열손실 증가와 팬을 작동하는 전력이 추가됨으로 인해 약 6−8W까지 증가하였다. 1시간 동안 자연대류 조건에서 동작 시 전력량은 약 9.0 kJ에 해당한다.
본 시스템은 Arduino 내부에서 PWM과 전압을 이용해 순간 전력 P(t)를 실시간으로 추정하고, 이를 시간 적분하여 누적 에너지 E(t)를 기록하였다. Wh 및 J 단위가 모두 제공되며, 이를 통해 배터리 사용 가능 시간, 열손실 추정, 제어 안정성 평가에 활용이 가능하였다.
기존 상용 혹은 실험실급 써멀마네킹 장비는 전신 표면을 균일 가열하기 위해 비교적 높은 전력이 요구된다. 문헌에 따르면 일반적인 전선 써멀마네킹의 목표 온도[TeX:] $$\left(34-35^{\circ} \mathrm{C}\right)$$ 유지 시 소비 전력은 약 100−300W 수준이며[5,26], 분절형 연구용 장비 또한 80−200W 범위를 보인다고 보고 되어 있다.
반면, 본 연구에서 제작된 저전력 기반 단일 구역 가열 시스템은 표면온도 [TeX:] $$30^{\circ} \mathrm{C}$$ 유지 시 약 2−8W 수준으로 동작하였으며, 이는 기존 장비 대비 10−100배의 낮은 전력 소비를 의미한다.
이러한 차이는 가열 영역이 제한적이며, [TeX:] $$32^{\circ} \mathrm{C}$$로 목표 온도가 낮고, PLA 쉘 구조의 열저장 효과, PID 제어에 따른 최소 출력 유지 등의 요인에 기인한 것으로 판단된다. 따라서 본 시스템은 상대적으로 낮은 전력 소비와 배터리 기반 구동이 가능하다는 점에서 휴대성 및 실험 비용 측면에서 높은 효율성을 가진다. 다만 전체 신체 분절 구역을 동시에 제어하는 기존 full-body 시스템 대비 구역별 정밀 제어 및 고온 유지에는 제한점이 존재한다.
3.4. 써멀마네킹 clo 값 검증
본 연구에서는 제작된 저가형 써멀마네킹의 전체 단열성능을 평가하기 위해 자연대류(Fan off)와 강제대류(Fan on) 조건에서 유효 단열값[TeX:] $$\left(\mathrm{I}_{\mathrm{a}}\right)$$을 산출하였다. 식 (9)에 따라 누드 상태의 마네킹의 단열력을 계산한 결과, 자연대류 조건에서 [TeX:] $$\mathrm{I}_{\mathrm{a}}$$는 약 [TeX:] $$0.143 \mathrm{~m}^2 \mathrm{~K} / \mathrm{W}$$로 나타났으며 이는 약 0.92 clo에 해당하였다. 이 값은 기존 문헌의 누드 마네킹의 단열값(일반적으로 0.5−0.8 clo 범위)보다 다소 높은 수준이다[27]. 이러한 차이는 단일 히터 구조와 약한 자연대류 환경이 결합하면서 중심부에 열이 집중되는 경향 때문으로 보인다. 자연대류에서는 표면 근처의 경계층이 두꺼워져 열전달이 제한되고, 내부에서 발생한 열이 신속하게 외부로 빠져나가지 못해 마네킹 내부에 열축적이 발생한다. 이로 인해 실제 표면 온도 차이가 크지 않아도 총 열손실량은 제한되고, 결과적으로 전체 단열값이 높게 산출된다. 즉, 자연대류 조건의 마네킹은 실제 인체보다 상대적으로 열을 덜 잃는 방향으로 평가되는 경향이 있다.
반면 강제대류(Fan on)에서는 전체 단열값이 약 0.22clo로 급격히 감소하였다. 외부 대류계수가 약 네 배 이상 증가하면서 표면 경계층이 얇아지고, 동일한 표면 온도 차라도 훨씬 큰 열손실이 발생하여 단열값이 크게 낮아진 것이다. 강제대류에서는 표면이 공기 흐름에 지속적으로 노출되어 열저항이 감소하고, 단일 히터 구조에서도 열이 전체 표면으로 더 효과적으로 확산되며 빠르게 방출된다. 이 과정에서 마네킹이 실제 풍동 또는 챔버 조건에서 보여주는 전형적인 convection-dominant 열거동을 재현하게 된다. 따라서 Fan ON에서 얻어진 0.22clo는 자연대류보다 훨씬 실제적이며, ISO 15831에서 요구하는 환경과도 열전달 특성이 유사하다고 볼 수 있다.
자연대류와 강제대류 사이의 차이는 단순한 팬 작동 여부를 넘어서, 마네킹의 열전달 지배 기작이 변화한다는 점에서 중요하다. 자연대류에서는 전도와 복사가 지배적이며 내부 열 축적이 발생해 상대적으로 높은 단열값이 나타나는 반면, 강제대류에서는 대류가 지배적인 형태로 전환되며 전체 열손실이 크게 증가하여 매우 낮은 단열값을 보인다. 이러한 두 조건 간 차이는 단일 히터 구조를 가진 저가형 마네킹이 대류환경에 매우 민감함을 의미하며, 실제 실험에서 바람 조건 설정이 결과 해석에 큰 영향을 줄 수 있음을 시사한다. 특히 자연대류에서 단열값이 과대평가되는 경향은 상용 마네킹에서도 일부 보고되는 현상으로, 내부 열원 구조가 단일일수록 그 영향이 강화된다.
결론적으로, 본 실험에서 얻어진 0.92 clo(Fan off)와 0.22 clo(Fan on)의 차이는 대류조건이 마네킹 단열성능 측정의 핵심 요인임을 명확히 보여준다. 자연대류에서는 비현실적으로 높은 단열값이 나올 수 있는 반면, 강제대류 환경은 실제 인체 전신 단열 특성과 더 잘 부합한 결과를 제공한다. 따라서 저가형 써멀마네킹의 열적 신뢰도를 높이기 위해서는 일정 수준 이상의 외기 흐름을 확보하는 것이 중요하며, 향후 설계에서는 히터 분포와 내부 공기순환 구조를 개선하여 자연대류 상태에서도 보다 실체에 가까운 열분포를 형성할 수 있도록 할 필요가 있다.
3.5. 써멀마네킹 비용 효율성 비교
본 연구에서 제작한 아두이노 기반 써멀 마네킹 시스템의 총 제작 비용은 세라믹 히터 약 1−2만 원, 적외선 및 열전대 센서 약 2−5만 원, 아두이노 및 제어보드 약 3−6만원, 3D 프린팅 PLA 외피 및 구조체 재료비 약 1−3만 원, 전원부 및 기타 부품 약 1만 원 내외로 구성되어 전체적으로 약 10−20만 원 수준으로 산정된다. 이는 전신 발한 기능, 다존 정밀 제어, 자동 데이터 로깅 시스템을 포함하는 상용 연구용 써멀 마네킹이 일반적으로 수천만 원에서 2~3억 원대에 형성되어 있는 것과 비교할 때 최소 수십 배에서 수백 배 이상 낮은 비용 수준이다. 따라서 본 시스템은 표준 시험 대응이나 고정밀 다구간 제어 기능에는 제한이 있으나, 내부 공기층에 의한 전도 및 대류 거동 분석과 같은 기초 열전달 특성 평가를 수행하는 데 있어 비용 대비 효율성이 높은 실험 플랫폼으로 활용 가능하다.
4. 결 론
본 연구에서는 아두이노 기반 제어 시스템과 FDM 3D프린팅 기술을 활용하여, 누구나 비교적 저렴한 비용으로 제작할 수 있는 신생아·유아용 저가형 써멀마네킹을 구현하고, 그 열적 거동과 단열 성능을 정량적으로 평가하였다. 특히 WHO 성장 스탠다드와 국내·외 인체 계측자료를 기반으로 평균 1개월 남아 체형을 모사한 PLA 쉘 구조와, 몸통 중심부에 배치한 단일 세라믹 히터–팬 모듈을 결합함으로써, 실제 열생리 구조를 1차 근사 수준에서 구현하고자 하였다.
먼저 PID 제어 검증 결과, [TeX:] $$\mathrm{K}_{\mathrm{p}}=18.0, \mathrm{~K}_{\mathrm{i}}=0.1, \mathrm{~K}_{\mathrm{d}}=25.0$$으로 설정된 제어기는 열관성이 큰 세라믹 히터 시스템에서도 목표 온도 [TeX:] $$32^{\circ} \mathrm{C}$$를 기준으로 [TeX:] $$\pm 0.3^{\circ} \mathrm{C}$$ 이내의 안정적인 제어 성능을 보였다. 초기 가열 구간에서는 높은 비례 이득과 웜업 제어를 통해 빠른 응답성을 확보하였고, 이후 미분 항과 낮은 적분 이득을 통해 잔열에 따른 오버슈트를 억제하였다. 이를 통해 저가형 하드웨어와 단일 센서·히터 구조임에도, 상용 장비에 근접한 수준의 재현성 있는 온도 제어가 가능함을 확인하였다.
내·외부 쉘 온도 및 부위별 열손실 분석 결과, 자연대류 조건에서는 중심부(몸통)에 열이 집중되며 말단부로 갈수록 온도와 열손실이 감소하는 전형적인 전도 지배형 거동을 보였다. 몸통–팔/다리–손/발 순으로 표면 온도와 열손실이 단계적으로 감소하였으며, 전체 평균 열유속은 약 [TeX:] $$40 \mathrm{~W} / \mathrm{m}^2$$ 수준으로, 기존 문헌에서 보고된 정적 마네킹 조건의 하한 값보다 낮게 나타났다. 반면 강제대류 조건에서는 내부 공기 흐름과 외부 경계층 붕괴에 따라 부위별 온도와 열손실이 빠르게 균일화되었고, 열유속은 약 [TeX:] $$140 \mathrm{~W} / \mathrm{m}^2$$까지 증가하여 일부 문헌에서 제시된 최대값[TeX:] $$\left(\text {약 } 130 \mathrm{~W} / \mathrm{m}^2\right)$$을 상회하였다. 이는 대류 환경을 적절히 조절할 경우, PLA 기반 저가형 마네킹도 상용 장비와 동등한 수준의 열손실 특성을 재현할 수 있음을 의미한다.
복사·대류 분리 해석에서는 전체 열손실 중 복사 성분의 기여도가 약 10% 이하로 제한적인 반면, 자연대류에서 강제대류로 전환될 때 대류 열손실이 약 [TeX:] $$35 \mathrm{~W} / \mathrm{m}^2$$에서 [TeX:] $$150 \mathrm{~W} / \mathrm{m}^2$$ 수준으로 약 4배 이상 증가함을 확인하였다. 이를 통해 본 시스템에서 지배적인 열전달 메커니즘은 대류이며, 팬 구동에 따른 외부 대류열전달계수[TeX:] $$\left(\mathrm{h}_{\text {out}}\right)$$의 증가는 곧바로 전체 열손실 및 단열력 변화로 이어진다는 점을 정량적으로 입증하였다. 또한 히터와 팬, 센서 및 제어부를 포함한 전체 시스템의 평균 소비전력은 자연대류 조건에서 약 2-3 W, 강제대류 조건에서도 6-8W 수준으로, 일반적인 상용 써멀마네킹(80−300W)에 비해 10−100배 낮은 전력 소모를 보였다. 이는 배터리 기반 구동과 이동·현장 실험 등에서 큰 장점을 가지며, 교육·연구 현장에서의 사용성을 높이는 요소로 평가된다.
마네킹 전체 표면 온도를 기반으로 산출한 유효 단열값[TeX:] $$\left(\mathrm{I}_{\mathrm{a}}\right)$$은 자연대류에서 약 0.92 clo, 강제대류에서 약 0.22 clo로 나타났으며, 이는 대류환경 변화가 단일 히터 기반 마네킹의 열거동에 결정적인 영향을 미침을 보여준다. 자연대류 조건에서는 낮은 외부 대류계수로 인해 내부 열이 마네킹 중심부에 축적되면서 실제보다 높은 단열값이 산출되었고, 강제대류 조건에서는 경계층이 얇아지며 열손실이 크게 증가하여 보다 현실적인 수준의 낮은 단열값이 도출되었다. 이러한 결과는 저가형 마네킹이라도 대류조건 설정만으로 측정 단열값이 크게 달라질 수 있으며, 특히 자연 대류 환경에서는 단열이 과대평가될 가능성이 있음을 의미한다. 반면 강제대류 조건은 실제 실험실 챔버 환경과 유사한 열전달 특성을 보여주어, 저가형 장비에서도 보다 신뢰도 높은 단열 측정이 가능함을 확인하였다. 따라서 정확한 단열 성능 평가를 위해서는 일정 수준의 외기 흐름을 확보하는 것이 필수적이며, 향후 마네킹 설계에서는 내부 열원 분포와 공기순환 구조를 개선하여 자연대류 상태에서도 실제 인체와 유사한 열분포를 재현할 필요가 있다.
본 연구는 신생아 및 유아 대상의 저비용 써멀마네킹을 구현하고, 자연대류·강제대류 환경에서의 열손실, 전력 소비, clo 값을 체계적으로 분석함으로써, 저전력·배터리 기반 구동이 가능한 교육·연구용 플랫폼으로서의 가능성과 대류 조건 변화에 민감하게 반응하는 열적 센싱 도구로서의 유효성을 동시에 제시하였다. 향후 다중 구역 히터 구조, 재질·형상 최적화, 발한 기능 및 동작 마네킹으로의 확장 연구를 통해, 취약 계층(신생아·유아)의 열적 쾌적성 평가와 저비용 의복 설계·검증에 보다 직접적으로 기여할 수 있을 것으로 기대된다.
감사의 글: 이 연구는 한국연구재단 이공분야 기초연구 사업에 의하여 지원된 논문입니다(NRF-2022R1A2C1010072). 또한 본 논문은 제1저자의 석사학위논문을 바탕으로 수정·보완하여 작성되었습니다.
References
- 1 M. Frontczak and P. Wargocki, "Literature Survey on How Different Factors Influence Human Comfort in Indoor Environments", Building and Environment, 2011, 46, 922−937.custom:[[[-]]]
- 2 G. Nellis and S. Klein, "Heat Transfer", Cambridge University Press, 2008.custom:[[[-]]]
- 3 Z. S. Abdel-Rehim, M. Saad, M. El-Shakankery, and I. Hanafy, "Textile Fabrics as Thermal Insulators", AUTEX Res. J., 2006, 6, 148-161.custom:[[[-]]]
- 4 Y. Y. Yan and J. E. Oliver, "The Clo: a Utilitarian Unit to Measure Weather/climate Comfort", International Journal of Climatology: A J. Royal Meteorological Society, 1996, 16, 1045− 1056.custom:[[[-]]]
- 5 I. Holmér, "Thermal Manikin History and Applications", Eur. J. Appl. Physiol., 2004, 92, 614−618.custom:[[[-]]]
- 6 D. D. Ion-Guţă, I. Ursu, A. Toader, D. Enciu, P. A. Dancă, I. Nastase, C. V. Croitoru, F. I. Bode, and M. Sandu, "Advanced Thermal Manikin for Thermal Comfort Assessment in Vehicles and Buildings", Appl. Sci., 2022, 12, 1826.custom:[[[-]]]
- 7 N. Jiang, S. Y. Yao, L. Y. Feng, H. J. Sun, and J. J. Liu, "Experimental Study on Flow Behavior of Breathing Activity Produced by a Thermal Manikin", Building and Environment, 2017, 123, 200−210.custom:[[[-]]]
- 8 A. Hannouch, C. Habchi, N. Metni, and T. Lemenand, "Thermal Analysis of a 3D Printed Thermal Manikin Inside an Infant Incubator", Int. J. Thermal Sci., 2023, 183, 107826.custom:[[[-]]]
- 9 A. Hannouch, "Numerical and Experimental Analyses of the Heat Transfer Inside Infant Incubators Using 3D Printed Thermal Manikin", Université d'Angers, 2021.custom:[[[-]]]
- 10 M. A. Johnson and M. H. Moradi, "PID Control", Springer, 2005.custom:[[[-]]]
- 11 M. de Onis, C. Garza, A. Onyango, and M. Rolland-Cachera, "WHO Growth Standards for Infants and Young Children", Archives de Pediatrie: Organe Officiel de la Societe Francaise de pediatrie, 2008, 16, 47−53.custom:[[[-]]]
- 12 J. W. Young, "Head and Face Anthropometry of Adult US Civilians", Civil Aerospace Medical Institute, 1993.custom:[[[-]]]
- 13 N. Cameron and L. Schell, "Human Growth and Development", Academic Press, 2021.custom:[[[-]]]
- 14 K. J. Aström and T. Hägglund, "PID Controllers: Theory, Design, and Tuning", The International Society of Measurement and Control, 1995.custom:[[[-]]]
- 15 A. F. Mills, "Heat and Mass Transfer, Richard D", Irwin, Boston, 1995.custom:[[[-]]]
- 16 J. Holman, "Heat Transfer", 10th ed., Mc-GrawHill Higher Education, 2010.custom:[[[-]]]
- 17 F. P. Incropera, D. P. DeWitt, T. L. Bergman, and A. S. Lavine, "Fundamentals of Heat and Mass Transfer", New York John Wiley & Sons, Inc., 1990.custom:[[[-]]]
- 18 M. F. Modest and S. Mazumder, "Radiative Heat Transfer", Academic Press, 2021.custom:[[[-]]]
- 19 C. K. Alexander and M. N. Sadiku, "Fundamentals of Electric Circuits", McGraw-Hill Education, 2017.custom:[[[-]]]
- 20 J. Y. Jung, "Optimal 3D Printing of Organic Heating Thermal Manikin Using Human Feature Point Based Automatic Segmentation and Support Structure Tomography", Kumoh National Institute of Technology, Gumi, 2022.custom:[[[-]]]
- 21 E. ISO 15831 (2004), "Clothing—physiological Effects— measurement of Thermal Insulation by Means of a Thermal Manikin", Brussels, Belgium: European Committee for Standardization, 2004.custom:[[[-]]]
- 22 I. Sarman, D. Bolin, I. Holmér, and R. Tunell, "Assessment of Thermal Conditions in Neonatal Care: Use of a Manikin of Premature Baby Size", Am. J. Perinatol., 1992, 9, 239−246.custom:[[[-]]]
- 23 E. B. Elabbassi, K. Belghazi, S. Delanaud, and J.-P. Libert, "Dry Heat Loss in Incubator: Comparison of Two Premature Newborn Sized Manikins", Eur. J. Appl. Physiol., 2004, 92, 679− 682.custom:[[[-]]]
- 24 A. Hannouch, C. Habchi, T. Lemenand, and K. Khoury, "Numerical Evaluation of the Convective and Radiative Heat Transfer Coefficients for Preterm Neonate Body Segments Inside an Incubator", Building and Environment, 2020, 183, 107085.custom:[[[-]]]
- 25 M. K. Ginalski, A. J. Nowak, and L. C. Wrobel, "Modelling of Heat and Mass Transfer Processes in Neonatology", Biomed. Mater., 2008, 3, 034113.custom:[[[-]]]
- 26 R. J. De Dear, E. Arens, Z. Hui, and M. Oguro, "Convective and Radiative Heat Transfer Coefficients for Individual Human Body Segments", Int. J. Biometeorol., 1997, 40, 141− 156.custom:[[[-]]]
- 27 A. P. Gagge, A. C. Burton, and H. C. Bazett, "A Practical System of Units for the Description of the Heat Exchange of Man with his Environment", Science, 1941, 94, 428−430.custom:[[[-]]]